![]()
 400-1601122
400-160112218888888888
![]()
400-1601122
,它能够一起检测XYZ轴,三个方向上的力值改变,又能够检测出三个轴上扭矩巨细(力的单位是KN,力矩的单位是KN/m)。
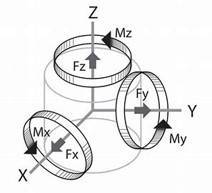
六分力传感器/六维力传感器弹性体选用专力结构,体积小,灵敏度较高、刚性好、维间耦合小、有机械过载维护功用。使用于遥控机器人,机器人手术,机械手臂研讨,手指力研讨,精细安装,主动磨削、概括盯梢、双手和谐、零力示教等作业中,在航空、航天及机械加工,轿车等职业中有广泛的使用。
影响六维力传感器精度的要素有许多,其间最重要的原因是维间耦合,物理学上指两个或两个以上的系统或两种运动方式间经过相互作用而互相影响以致联合起来的现象。六分力传感器中六个通道中的每一个通道中的输入信号都会对其他通道的输出信号形成影响,因而想要一个输入只操控一个输出,不对其他通道形成影响几乎是不或许的。
解耦便是要在某些特定的程度上减小或消除耦合搅扰。六维力/力矩传感器的解耦是经过数学的办法竭尽或许小的差错地确认出来传感器的输入与输出的联系。
一般消除耦合或许按捺耦合能够从两个方历来做:第一种是在出产传感器之前进行的作业,一般叫做结构解耦,即从传感器的规划上来消除或许按捺耦合,该办法触及到了传感器的制造工艺问题,这个往往很难,并且或许会添加本钱:第二种则是使用系统性的数学模型,要矩阵解耦,运用数字信号处理的办法来削减或许消除传感器的维间耦合,该办法对制造流程与工艺要求比较低,十分简单到达,并且还能获得很好的作用。
